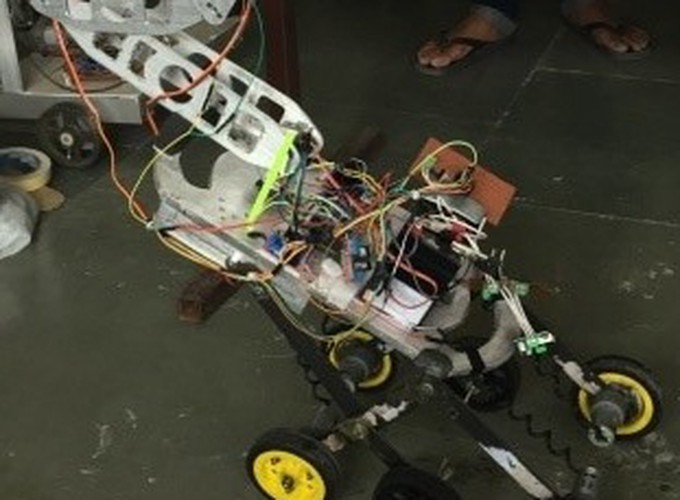
This project proposed a methodology of designing a wirelessly controlled mobile robotic arm with modular end effectors. Complementing to it there are various step of fabrication and manufacturing processes that were used to accomplish the design that was proposed. The idea behind this project was to innovate existing robotic arm that is usually designed for single purpose operation and to optimize it and make it capable of doing various task.
The movements of the robotic arm were purely controlled by human gestures. The base movements that help in moving the arm to the required location were controlled by gestures of left hand while the movements of the various joints of the arm were controlled by the right arm gestures of the operator. The arm was coupled with an android troubleshooting application which helps in checking all the wireless communications. This is especially useful in fault finding in cases of any malfunction
Team Members: Gungeet Singh, Damanjit Singh, Akhil Jindial, Aadil Marya, Harleen Singh, Arpit Jindal
Class: B.Tech 4th year Mechatronics